Joy Christian wrote:gill1109 wrote:According to the Wikipedia (and other) sources I gave you, we can use a generalization of Euler angles to higher dimensions. For S^3 there are three angles, while for S^2 there were two angles.
The claim of Wikipedia and other sources is wrong. Euler angles do not provide a singularity-free representation of S^3. Only quaternions can provide a singularity-free representation of S^3.
The issue of singularities is irrelevant. Despite Gimbal lock, there is no problem at all.
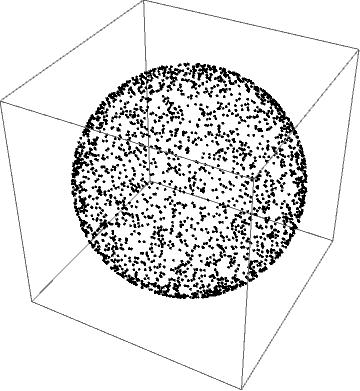
The question was: how to pick a uniformly distributed point on the quaternionic 3-sphere. The answer is well known, and it is given in the sources I gave you. Take a look at Eduarda Moura & David G. Henderson (1996), Experiencing geometry: on plane and sphere. Prentice Hall. ISBN 978-0-13-373770-7 (Chapter 20: 3-spheres and hyperbolic 3-spaces).
Despite the fact that spherical coordinates do not, in the strict mathematical sense, define a coordinate chart on the sphere at zenith and nadir, there is no possible objection to using them to parametrize the sphere, and in particular, using them to generate a uniformly distributed point on the sphere. Obviously, one does not give each Euler angle an independent, uniform, distribution! Using the appropriate sequence of conditional distributions of each angle given the previously selected ones automatically takes care of the "singularities".
From wikipedia ("gimbal lock"): "The gimbal lock problem does not make Euler angles "invalid" (they always serve as a well-defined coordinate system), but it makes them unsuited for some practical applications." (my emphasis of the word "some")